|
ReadFramework
|
|
ReadFramework
|
Classes | |
| struct | lsd::KeyLine |
| A class to represent a line. More... | |
| class | lsd::LSDDetector |
Functions | |
| cv::Point2f | lsd::KeyLine::getStartPoint () const |
| cv::Point2f | lsd::KeyLine::getEndPoint () const |
| cv::Point2f | lsd::KeyLine::getStartPointInOctave () const |
| cv::Point2f | lsd::KeyLine::getEndPointInOctave () const |
| lsd::KeyLine::KeyLine () | |
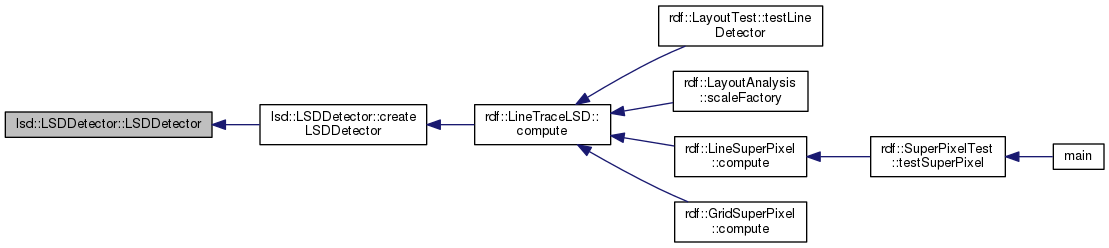
| lsd::LSDDetector::LSDDetector () | |
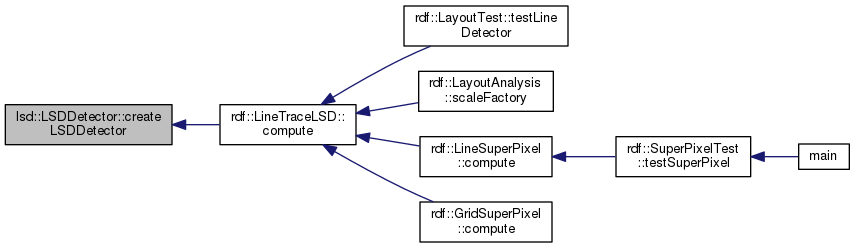
| static cv::Ptr< LSDDetector > | lsd::LSDDetector::createLSDDetector () |
| Creates ad LSDDetector object, using smart pointers. More... | |
| void | lsd::LSDDetector::detect (const cv::Mat &image, CV_OUT std::vector< KeyLine > &keypoints, int scale, int numOctaves, const cv::Mat &mask=cv::Mat()) |
| Detect lines inside an image. More... | |
| void | lsd::LSDDetector::detect (const std::vector< cv::Mat > &images, std::vector< std::vector< KeyLine > > &keylines, int scale, int numOctaves, const std::vector< cv::Mat > &masks=std::vector< cv::Mat >()) const |
Variables | |
| float | lsd::KeyLine::angle |
| int | lsd::KeyLine::class_id |
| int | lsd::KeyLine::octave |
| cv::Point2f | lsd::KeyLine::pt |
| float | lsd::KeyLine::response |
| float | lsd::KeyLine::size |
| float | lsd::KeyLine::startPointX |
| float | lsd::KeyLine::startPointY |
| float | lsd::KeyLine::endPointX |
| float | lsd::KeyLine::endPointY |
| float | lsd::KeyLine::sPointInOctaveX |
| float | lsd::KeyLine::sPointInOctaveY |
| float | lsd::KeyLine::ePointInOctaveX |
| float | lsd::KeyLine::ePointInOctaveY |
| float | lsd::KeyLine::lineLength |
| int | lsd::KeyLine::numOfPixels |
|
static |
| void lsd::LSDDetector::detect | ( | const cv::Mat & | image, |
| CV_OUT std::vector< KeyLine > & | keypoints, | ||
| int | scale, | ||
| int | numOctaves, | ||
| const cv::Mat & | mask = cv::Mat() |
||
| ) |
Detect lines inside an image.
| image | input image |
| keypoints | vector that will store extracted lines for one or more images |
| scale | scale factor used in pyramids generation |
| numOctaves | number of octaves inside pyramid |
| mask | mask matrix to detect only KeyLines of interest |
| void lsd::LSDDetector::detect | ( | const std::vector< cv::Mat > & | images, |
| std::vector< std::vector< KeyLine > > & | keylines, | ||
| int | scale, | ||
| int | numOctaves, | ||
| const std::vector< cv::Mat > & | masks = std::vector<cv::Mat>() |
||
| ) | const |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
| images | input images |
| keylines | set of vectors that will store extracted lines for one or more images |
| scale | scale factor used in pyramids generation |
| numOctaves | number of octaves inside pyramid |
| masks | vector of mask matrices to detect only KeyLines of interest from each input image |
|
inline |
Returns the end point of the line in the original image
|
inline |
Returns the end point of the line in the octave it was extracted from
|
inline |
Returns the start point of the line in the original image
|
inline |
Returns the start point of the line in the octave it was extracted from
|
inline |
constructor
|
inline |
| float lsd::KeyLine::angle |
orientation of the line
| int lsd::KeyLine::class_id |
object ID, that can be used to cluster keylines by the line they represent
| float lsd::KeyLine::endPointX |
| float lsd::KeyLine::endPointY |
| float lsd::KeyLine::ePointInOctaveX |
| float lsd::KeyLine::ePointInOctaveY |
| float lsd::KeyLine::lineLength |
the length of line
| int lsd::KeyLine::numOfPixels |
number of pixels covered by the line
| int lsd::KeyLine::octave |
octave (pyramid layer), from which the keyline has been extracted
| cv::Point2f lsd::KeyLine::pt |
coordinates of the middlepoint
| float lsd::KeyLine::response |
the response, by which the strongest keylines have been selected. It's represented by the ratio between line's length and maximum between image's width and height
| float lsd::KeyLine::size |
minimum area containing line
| float lsd::KeyLine::sPointInOctaveX |
line's extremes in image it was extracted from
| float lsd::KeyLine::sPointInOctaveY |
| float lsd::KeyLine::startPointX |
lines's extremes in original image
| float lsd::KeyLine::startPointY |
 1.8.11
1.8.11