Contains basic algorithms to manipulate images.
More...
#include <Algorithms.h>
|
| static int | doubleEqual (double a, double b) |
| | The resulting rounding error after floating point computations depend on the specific operations done.The same number computed by different algorithms could present different rounding errors.For a useful comparison, an estimation of the relative rounding error should be considered and compared to a factor times EPS.The factor should be related to the cumulated rounding error in the chain of computation.Here, as a simplification, a fixed factor is used. More...
|
| |
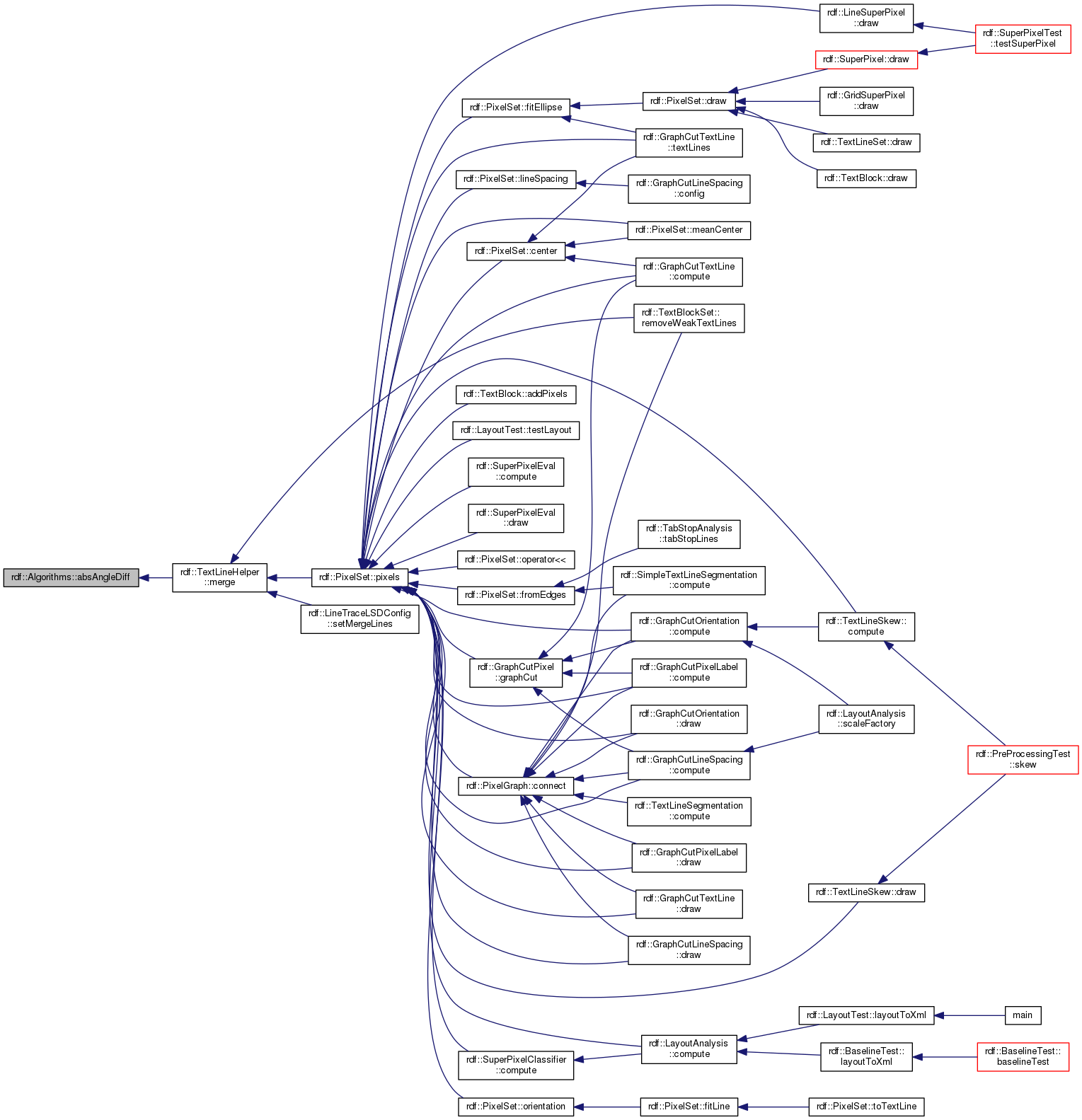
| static double | absAngleDiff (double a, double b) |
| |
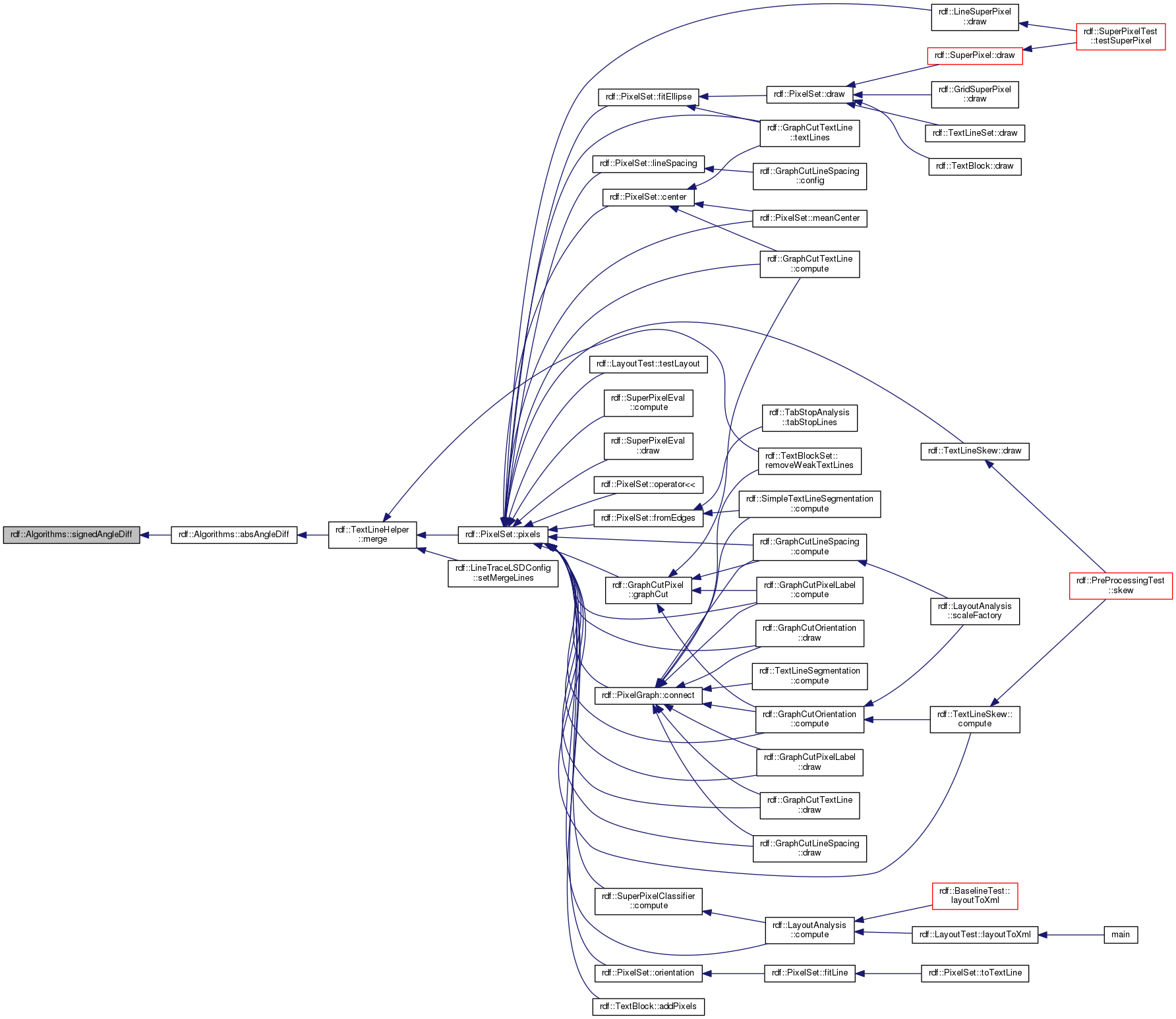
| static double | signedAngleDiff (double a, double b) |
| |
| static double | min (const QVector< double > &vec) |
| | Returns the minimum of the vector or DBL_MAX if vec is empty. More...
|
| |
| static double | max (const QVector< double > &vec) |
| | Returns the maximum value of vec or -DBL_MAX if vec is empty. More...
|
| |
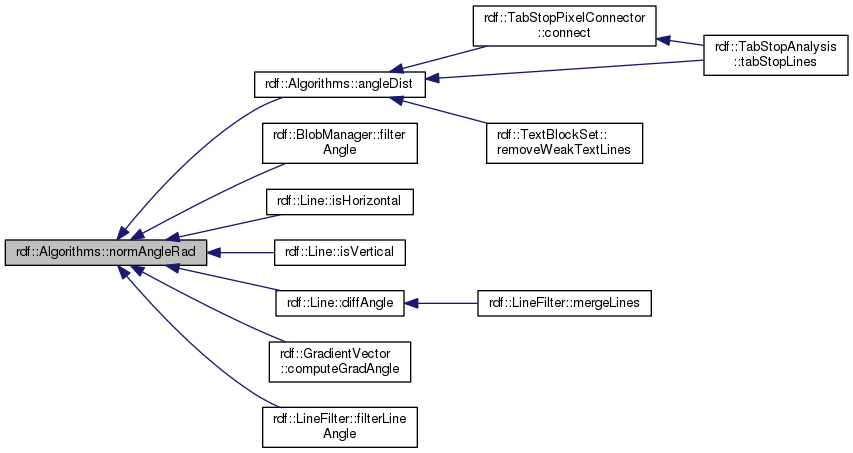
| static double | normAngleRad (double angle, double startIvl=0.0, double endIvl=2.0 *CV_PI) |
| | Computes the normalized angle within startIvl and endIvl. More...
|
| |
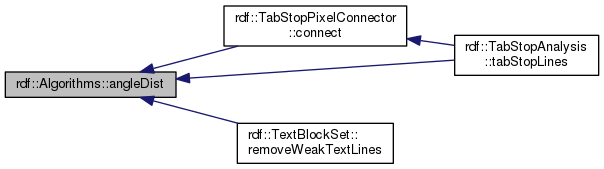
| static double | angleDist (double angle1, double angle2, double maxAngle=2.0 *CV_PI) |
| | Computes the distance between two angles. Hence, min(angleDiff, CV_PI*2-(angleDiff)) More...
|
| |
| template<typename numFmt > |
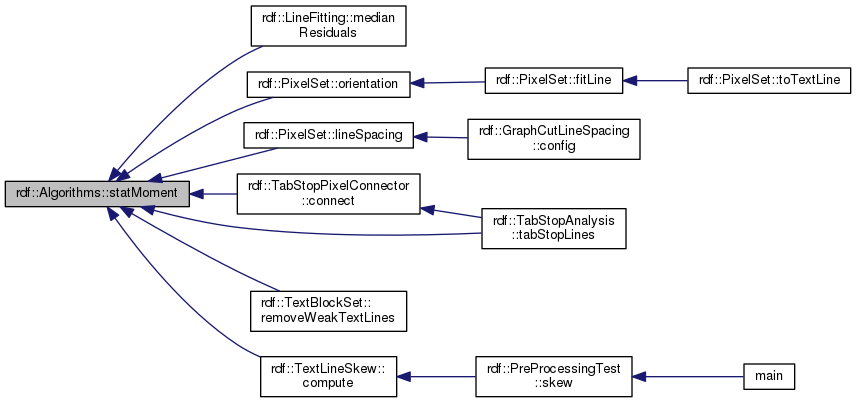
| static double | statMoment (const QList< numFmt > &valuesIn, double momentValue, bool interpolated=true) |
| | Computes robust statistical moments (quantiles). More...
|
| |
Contains basic algorithms to manipulate images.
| double rdf::Algorithms::absAngleDiff |
( |
double |
a, |
|
|
double |
b |
|
) |
| |
|
static |
| double rdf::Algorithms::angleDist |
( |
double |
angle1, |
|
|
double |
angle2, |
|
|
double |
maxAngle = 2.0*CV_PI |
|
) |
| |
|
static |
Computes the distance between two angles. Hence, min(angleDiff, CV_PI*2-(angleDiff))
- Parameters
-
| angle1 | The angle1. |
| angle2 | The angle2. |
- Returns
- The angular distance.
| int rdf::Algorithms::doubleEqual |
( |
double |
a, |
|
|
double |
b |
|
) |
| |
|
static |
The resulting rounding error after floating point computations depend on the specific operations done.The same number computed by different algorithms could present different rounding errors.For a useful comparison, an estimation of the relative rounding error should be considered and compared to a factor times EPS.The factor should be related to the cumulated rounding error in the chain of computation.Here, as a simplification, a fixed factor is used.
- Parameters
-
- Returns
- equal if relative error <= factor x eps
| double rdf::Algorithms::max |
( |
const QVector< double > & |
vec | ) |
|
|
static |
Returns the maximum value of vec or -DBL_MAX if vec is empty.
- Parameters
-
| vec | A vector with double values. |
- Returns
- the maximum
| double rdf::Algorithms::min |
( |
const QVector< double > & |
vec | ) |
|
|
static |
Returns the minimum of the vector or DBL_MAX if vec is empty.
- Parameters
-
| vec | A vector with double values. |
- Returns
- the minimum
| double rdf::Algorithms::normAngleRad |
( |
double |
angle, |
|
|
double |
startIvl = 0.0, |
|
|
double |
endIvl = 2.0*CV_PI |
|
) |
| |
|
static |
Computes the normalized angle within startIvl and endIvl.
- Parameters
-
| angle | The angle in rad. |
| startIvl | The intervals lower bound. |
| endIvl | The intervals upper bound. |
- Returns
- The angle within [startIvl endIvl].
| double rdf::Algorithms::signedAngleDiff |
( |
double |
a, |
|
|
double |
b |
|
) |
| |
|
static |
template<typename numFmt >
| static double rdf::Algorithms::statMoment |
( |
const QList< numFmt > & |
valuesIn, |
|
|
double |
momentValue, |
|
|
bool |
interpolated = true |
|
) |
| |
|
inlinestatic |
Computes robust statistical moments (quantiles).
- Parameters
-
| valuesIn | The statistical set (samples). |
| momentValue | The statistical moment value (0.5 = median, 0.25 and 0.75 = quartiles). |
| interpolated | A flag if the value should be interpolated if the length of the list is even. |
- Returns
- The statistical moment.
The documentation for this class was generated from the following files:

 1.8.11
1.8.11 
